- TOP
- Euresys社
- Open eVisionライブラリ
- Easy3DLaserLine
![]()
Easy3DLaserLine
Easy3DLaserLine
Easy3DLaserLineは、3Dセンサーを用いて画像データを深度マップとして表示させることのできる、Open eVisionの画像処理ライブラリです。
主な特長
- シングルおよびデュアルレーザーライン抽出による深度マップの生成が可能
- レーザートライアンギュレーションのセットアップための便利で強力な3Dキャリブレーション
- Coaxlink Quad 3D-LLE フレームグラバーと互換性あり
主な用途
PCB検査、LED検査、コネクタの検査、寸法検査、アセンブリ検査、ピック&プレース、食品検査
-
仕様
ライブラリ名 Easy3DLaserLine
対応OS Windows 10 (32, 64 bits)
Windows 8 (32, 64 bits)
Windows 7 (32, 64 bits)最小動作スペック RAM:8 GB
表示サイズ:800 x 600 (1280 x 1024推奨)
色深度:16ビット (32 ビット推奨)
ハードディスク容量:~2 GB(選択したオプションに応じて変動) -
Easy3DLaserLineのメリット
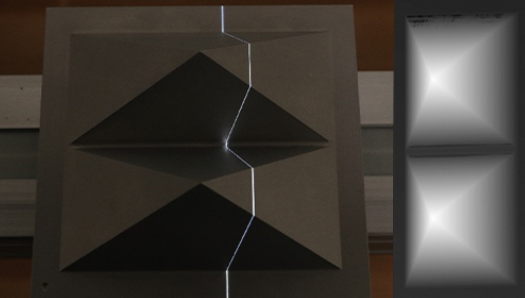
深度マップへの3Dレーザーライン抽出が可能
Easy3DLaserLineは、検査対象に投影されたレーザーラインを含む一連の画像から深度マップを生成します。
生成された深度マップの各ピクセルには、画像のレーザーラインの位置情報が含まれます。
数種類の抽出モードと多種のフィルターがサポートされています。
また、Coaxlink Quad 3D-LLEフレームグラバーへのハードウェア実装に完全対応しています。デュアルレーザーライン抽出に対応
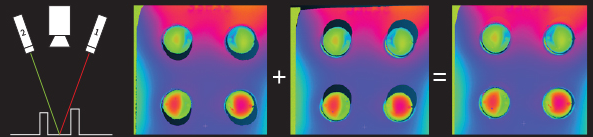
ソフトウェアおよびハードウェアの実装に対応しているデュアルレーザーライン抽出プロセスにより、オクルージョンの影響を低減します。オクルージョンは、オブジェクトにレーザー照射されていない場所があるときに生じます。角度の異なる2つのレーザーを使用することで、定義されない領域を減少します。Easy3DLaserLineに含まれるオブジェクトベースのキャリブレーションにより、取得されたデータを組み合わせて1つのポイントクラウドを形成することができます。
キャリブレーション
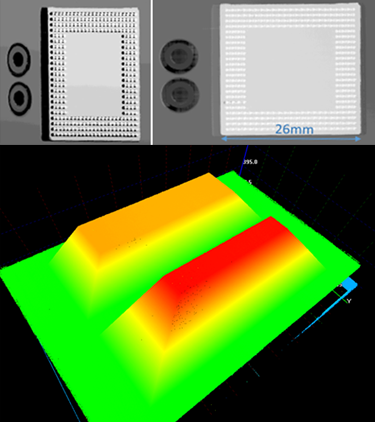
ほとんどの3D測定は、歪みのないデータや計量表現が必要であるため、レーザートライアンギュレーションのセットアップが必要です。
Easy3Dは深度マップに適用されたキャリブレーションモデルを計算し、補正済みの3Dポイントクラウドに変換します。